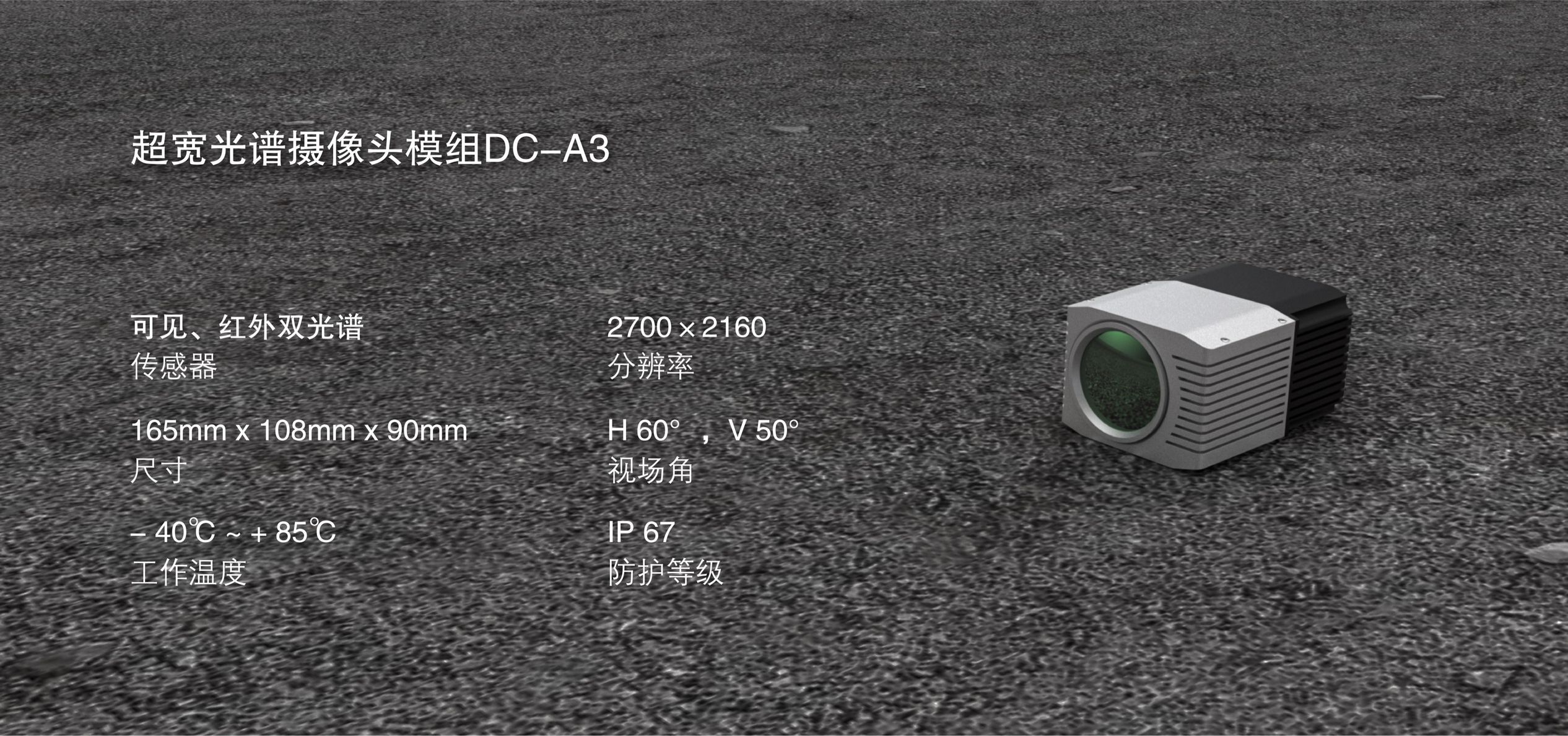
「 超宽光谱摄像头模组DC-A3 」
- 对生命体和移动物体的特殊的感知能力。
- 超宽光谱的全天候物理信息,使得算法识别精度取得巨大提升。
- 对比目前一流的可见光车载摄像头,在取得相同算法识别精度的情况下,所需算力资源仅为2%~30%。
- 逆光、车灯眩光、无光、弱光下的清晰成像能力,可以轻松应对当前自动驾驶无法有效解决的极端场景下的算法感知难题,从而极大的提升自动驾驶安全性。
- 雨雾、 沙尘天气下的可靠成像, 对雨天的车尾水雾和大风天气的沙尘,算法感知性能提升。
「算法融合」的前提条件
- 八维数据:采用超宽光谱(可见光、红外、激光),同一个像素获得XYZRGBTt八个维度信息;
- XYZ:空间位置;RGB:色彩;T:温度;t:像素内感光部位状态自检;
- 时空同步:三光谱同一中心光轴。